With high frequency drive came another issue. When a motor
is driven at a high frequency, it loses torque at low speeds,
making the start-up issue worse. Again technology came to the
rescue, when decoder manufacturers added pulses or shifted
the frequency of the pulses as the motor started. Train Control
Systems (TCS) was one of the pioneers of this technique, which
they called dither. Digitrax calls it torque compensation.
Another technique was developing a following. Using the Back
EMF (reverse voltage) developed by the motor, a BEMF style
decoder
is able to sense the
motor speed during the time that the decoder is not driving
power through the motor. Being able to sense motor speed allows
the decoder to track trends, such as slowing down, and correct for
them. Modern sound decoders, in addition to motor control, use
this BEMF data to adjust sounds for load, chuff rate, etc.
Getting started with DecoderPro
I highly recommend DecoderPro (see my July 2012 column:
for this tweaking. Every
time I mention DecoderPro, or some other aspect of JMRI, I try
to remind folks to donate to the cause. Even a $10 bill a year
from all the users would make a huge difference. Do so now,
while you are thinking of it. Just click on the link:
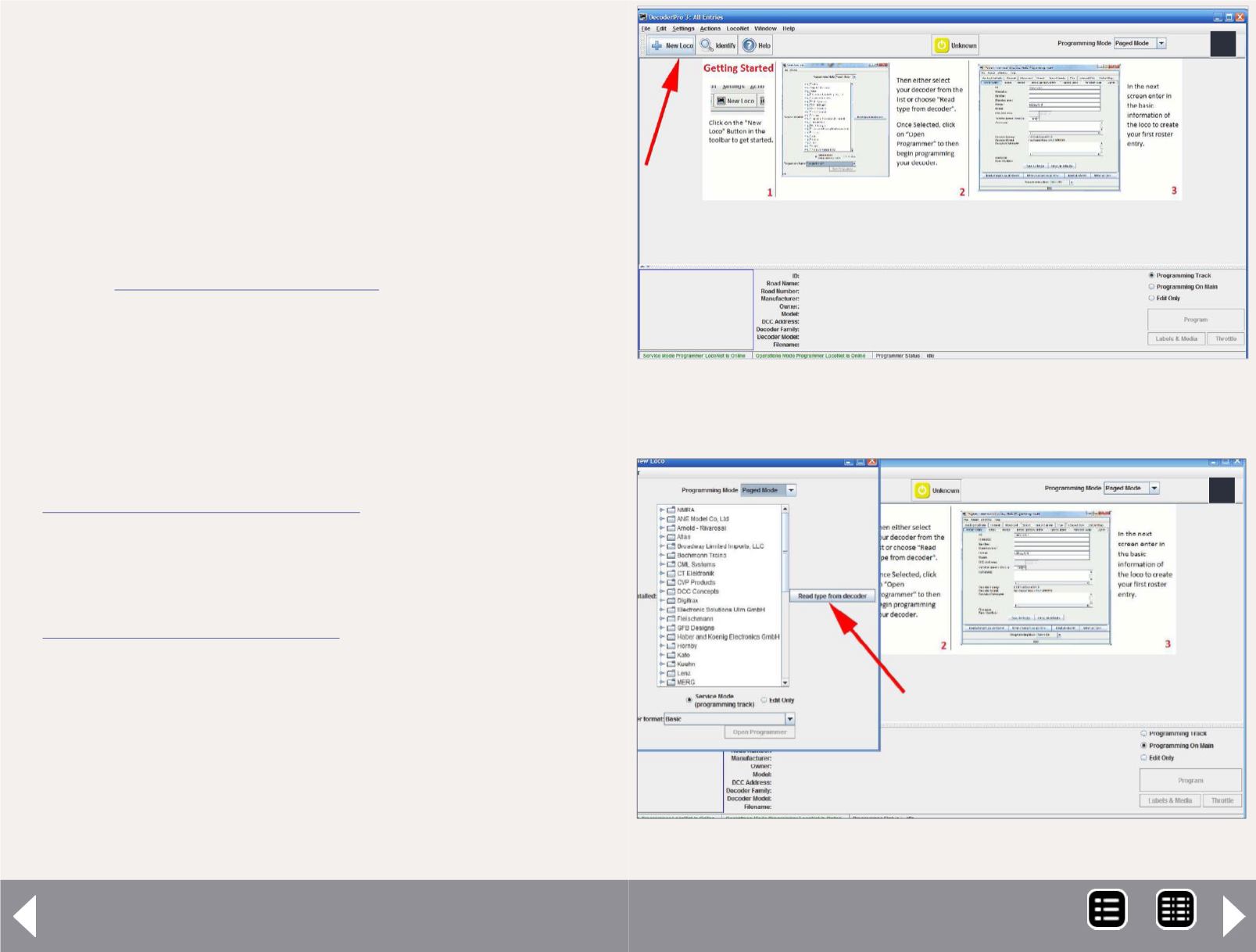
Assuming you have done nothing with DecoderPro before,
you start by putting the loco on the programming track. Open
DecoderPro. Select NEW LOCO (3).
Then READ TYPE FROM DECODER (4).
Once you have the decoder selected correctly, make sure
COMPREHENSIVE display mode is selected and open the file in
the PROGRAMMING TRACK mode.
DCC Impulses Column - 4
3: DecoderPro screen: Starting a new loco with the
NEW LOCO button.
3
4: DecoderPro screen: READ TYPE FROM DECODER.
4
MRH-Dec 2013


